知能ロボティクス研究所
Society 5.0研究拠点
所長 藤田 豊己(工学部 電気電子工学課程 教授)
ロボットには,医療,福祉,生産,災害対応などにおいて人々の生活をサポートすることが期待されています。そのためには,自ら認識,判断し行動する「知能ロボット」が必要であり,電子,機械,情報技術に加え,人間や生物の機能・特性を考慮したインタフェース,デザイン技術も重要となります。本研究所は,これらの知能ロボット技術の研究・開発を推進し,地域産業や人々の暮らしに貢献することを目指します。
- キーワード
- 自律作業ロボット、ウェアラブルロボット、福祉ロボット、ロボット学習・制御、ロボットマニピュレーション、ロボットアクチュエータ・センサ、ロボットデザイン、ロボットインタフェース、ロボットコミュニケーション、人間機能理解、認知・知覚特性、環境認識・センシング、BIM(Building Information Modeling)、複数ロボット協調、ネットワークロボット

研究内容
知能ロボットに関わる要素技術研究・開発に取り組み,人間や生物の機能・特性も考慮した新たなロボット技術研究を展開していきます。具体的に主に以下の研究を推進し,新たな技術の創出を目指します。
- 自律作業ロボット関連研究
- ウェアラブルロボット関連研究
- 視覚障がい者用自律移動ロボット関連研究
- 歩行支援ロボット関連研究と実地評価
- 機能的ロボットデザイン研究
- 環境センシング・モデリングによるロボットの自律行動
- 知的行動のための認識・学習・制御機能
- 複数ロボットによる協調探索システム
- バイオリン演奏ロボットの制御
- マニピュレーション用アクチュエータ・センサの開発と応用
- ロボット技術との融合に向けた人間の機能理解
- 環境・他者行為理解のための知覚認識機能研究
- 認知・知覚特性に基づくインタフェースシステム
- ネットワークロボットのアンコンシャスセンシング技術に関する研究
- ロボットコミュニケーションにおける学習プロセスモデルの研究
- BIM 情報を活用した空間認識技術の開発
- ロボットを活用した環境計測システムの開発
 双腕不整地移動ロボット
双腕不整地移動ロボット
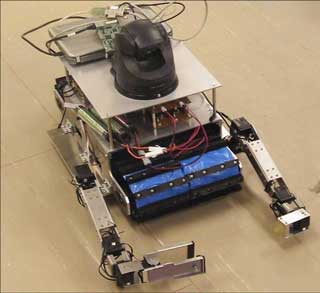
 4脚クローラ型ロボット
4脚クローラ型ロボット
 バーチャルカメレオン
バーチャルカメレオン
 移乗支援ロボット
移乗支援ロボット
 移動トイレロボット
移動トイレロボット
 リハビリ用歩行車
リハビリ用歩行車
 視覚障がい者用ガイドロボット
視覚障がい者用ガイドロボット
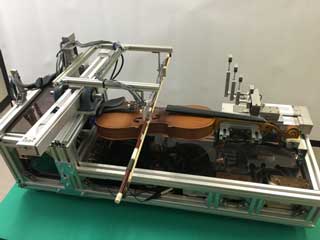 バイオリン演奏ロボット
バイオリン演奏ロボット
 ものを優しく掴んで運ぶ
ものを優しく掴んで運ぶ
 触覚・近接センサを備えたロボット指
触覚・近接センサを備えたロボット指
 皮膚感覚を備えたロボットアーム
皮膚感覚を備えたロボットアーム
令和6年度の研究(または活動)内容
研究活動
各メンバーが研究を推進した.以下,主な内容を挙げる.
・全方向移動型火災感知器点検ロボットの開発 (電気電子工学科 藤田研究室)
・深層学習を用いた不整地ロボットの対象物探索と回収行動 (電気電子工学科 藤田研究室)…続きを読む
令和5年度の研究(または活動)内容
研究活動
各メンバーが研究を推進した.以下,主な内容を挙げる.
・全方向移動ロボットの開発と LiDAR SLAM による環境認識と自律走行制御(電気電子工学科 藤田研究室)
・深層学習を用いた不整地ロボットの対象物の探索と回収行動 (電気電子工学科 藤田研究室)…続きを読む
- 過去の研究(または活動)内容
-
令和4年度の研究(または活動)内容
研究活動
各メンバーが研究を推進した.以下,主な内容を挙げる.
・犬笛で操作する6脚ロボットの研究 (電気電子工学科 伊藤研究室)
・上下反転耳介を用いた音源定位の研究 (電気電子工学科 伊藤研究室)…続きを読む令和3年度の研究(または活動)内容
各メンバーが研究を推進した。以下,主な内容を挙げる。
・圧縮バネを用いた3点支持構造を有する蠕動運動型移動ロボットの開発(下図左,電気電子工学科 水野研究室)
・ガスセンサを用いた匂い探索ロボットの開発(下図右,電気電子工学科 水野研究室)…続きを読む令和2年度の研究(または活動)内容
ミーティングの開催
以下の通り,ミーティングを3回開催した.
第1回: 2020年7月27日(月) 17:00〜18:40 Teams によるオンライン開催
・研究所の目的の共有,メンバー研究紹介,情報交換
第2回: 2020年11月26日(木) 13:30〜15:00 Teams によるオンライン開催
・メンバー研究紹介,意見交換、研究展開の可能性の検討
第3回: 2021年3月18日(木) 16:30〜18:45 Teams によるオンライン開催
・今年度の活動内容報告,次年度の活動についての検討…続きを読む
メンバー
学内メンバー
- 伊藤 仁(電気電子工学課程 教授)
- 梅田 弘樹(産業デザイン学科 教授)
- 堀江 政広(産業デザイン学科 教授)
- 許 雷(建築学科 教授)
- 田村 英樹(情報通信工学課程 教授)
- 中山 英久(電気電子工学課程 教授)
- 三浦 直樹(情報通信工学課程 教授)
- 水野 文雄(電気電子工学課程 教授)
- 室山 真徳(電気電子工学課程 教授)
- 丸山 次人(東北工業大学 名誉教授)
- 佐々木 大雅(東北工業大学 客員研究員)
関連研究テーマ等
科研費テーマ等
令和6年度
- 科学研究費補助金 基盤研究(C)(一般))
「声道型入力デバイスを用いたリアルタイム音声合成システムの開発」(代表:伊藤仁) - 科学研究費補助金 基盤研究(C)(一般)
「荷重計測機能付き歩行車を用いた歩行訓練動作評価システムに関する研究」(代表:中山英久) - 科学研究費補助金 基盤研究(C)(一般)
「合意形成における手続きの公正さが利他的価値判断に果たす役割:脳科学的検証」(代表:三浦直樹) - 科学研究費補助金 基盤研究(C)(一般)
「フィードバック制御による映像提示を行う斜視視覚支援ウェアラブルシステムの開発」(代表:水野文雄)
令和5年度
- 科学研究費補助金 基盤研究(C)(一般)
「声道型入力デバイスを用いたリアルタイム音声合成システムの開発」(代表:伊藤仁) - 科学研究費補助金 基盤研究(C)(一般)
「合意形成における手続きの公正さが利他的価値判断に果たす役割:脳科学的検証」(代表:三浦直樹) - 科学研究費補助金 基盤研究(C)(一般)
「フィードバック制御による映像提示を行う斜視視覚支援ウェアラブルシステムの開発」(代表:水野文雄)
- 過去の科研費テーマ等
-
令和4年度
- 科学研究費補助金 基盤研究(C)(一般)
「6脚クローラ型ロボットの学習と注視機能による自律作業」(代表:藤田 豊己) - 科学研究費補助金 基盤研究(C)(一般)
「脳活動・眼球運動計測に基づく協調作業で生じる「場の空気」の可視化に関する研究」(代表:三浦 直樹) - 科学研究費補助金 基盤研究(C)(一般)
「フィードバック制御による映像提示を行う斜視視覚支援ウェアラブルシステムの開発」(代表:水野 文雄)
令和3年度
- 科学研究費補助金 基盤研究(C)(一般)
「6脚クローラ型ロボットの学習と注視機能による自律作業」(代表:藤田 豊己) - 科学研究費補助金 基盤研究(C)(一般)
「上腕動作をトリガーとして発話の運動指令を制御する Motion-To-Speech」(代表:伊藤 仁) - 科学研究費補助金 基盤研究(C)(一般)
「脳活動・眼球運動計測に基づく協調作業で生じる「場の空気」の可視化に関する研究」(代表:三浦 直樹) - 科学研究費補助金 基盤研究(C)(一般)
「再構成可能な触覚センサシステムを用いた接触評価法の創成」(代表:室山 真徳) - JST COI 若手連携研究ファンドデジタル分野 連携研究「人体装着型皮膚感覚システムの開発および社会実装と国際貢献への挑戦」(代表:室山 真徳)
令和2年度
- 科学研究費補助金 基盤研究(C)(一般)
「6 脚クローラ型ロボットの学習と注視機能による自律作業」(代表:藤田 豊己) - 科学研究費補助金 基盤研究(C)(一般)
「上腕動作をトリガーとして発話の運動指令を制御する Motion-To-Speech」(代表:伊藤 仁) - 科学研究費補助金 基盤研究(C)(一般)
「脳活動・眼球運動計測に基づく協調作業で生じる「場の空気」の可視化に関する研究」(代表:三浦 直樹) - 科学研究費補助金 基盤研究(C)(一般)
「再構成可能な触覚センサシステムを用いた接触評価法の創成」(代表:室山 真徳) - JST COI 若手連携研究ファンドデジタル分野 連携研究「人体装着型皮膚感覚システムの開発および社会実装と国際貢献への挑戦」(代表:室山 真徳)
- 科学研究費補助金 基盤研究(C)(一般)
学内公募研究
令和5年度
- 「感覚センサ統合によるロボットハンドリングシステムに関する研究開発」(室山真徳)
- 過去の学内公募研究等
-
令和4年度
- 「スモール時系列センシングデータを用いた高性能エッジ機械学習システムの研究開発」(室山 真徳)
令和3年度
- 「多脚クローラ型ロボットによる自律作業動作制御の研究」(藤田 豊己)
- 「高いインタクラクション性能を持つ遠隔ロボット操作に関する研究開発」(室山 真徳)
令和2年度
- 多脚クローラ型ロボットによる自律作業動作制御の研究(藤田 豊己)